- Что такое частотный преобразователь
- Плюсы и минусы частотного преобразователя
- Область применения
- Станки
- Электротранспорт
- Насосное оборудование
- Вентиляция
- Виды приборов
- Скалярный метод управления
- Векторный метод управления
- Принцип действия частотного преобразователя
- Возможности преобразователя частоты
- Работа при нестабильном напряжении
- Работа на резонансных частотах
- Сетевой обмен
- Настройка частотного преобразователя для электродвигателя
- Частотные преобразователи для асинхронных двигателей
- Классификация преобразователей частоты
- Структура частотного преобразователя
- Непосредственные частотные преобразователи
- Устройство частотных преобразователей
- Разница типов сигналов управления
- Выбор мощности частотного преобразователя
- Электромагнитная совместимость преобразователей частоты
- Конструкция частотного преобразователя
- Функциональная схема частотного преобразователя
- Методы управления
- Методы модуляции
- Как параметрировать (программировать) частотный преобразователь
- Режимы работы двигателя (диаграммы нагрузок)
- Как выбирать
- Управление
- Мощность
- Сетевое напряжение
- Диапазон частотной регулировки
- Входы управления
- Количество выходных сигналов
- Шина управления
- Перегрузочные способности
- Самостоятельная сборка
- Защита и безопасность
- Вместо заключения
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.
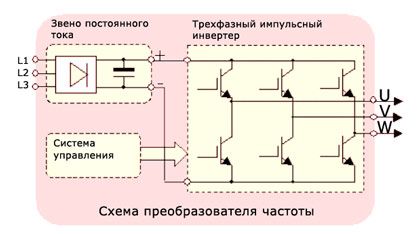
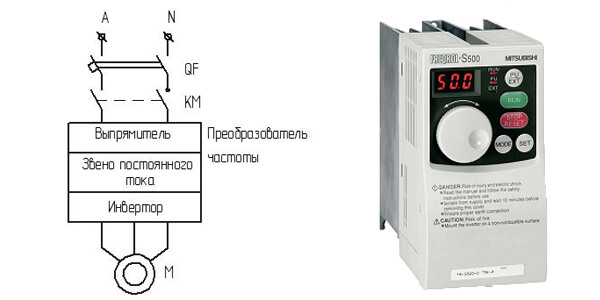
Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.

В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.
В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами. Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости. Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились.
Одновременно с частотой изменяется и подводимое напряжение, что позволяет увеличить КПД и коэффициент мощности электродвигателя. Все это позволяет получить высокие энергетические показатели асинхронных двигателей, продлить срок их эксплуатации.
Плюсы и минусы частотного преобразователя
В виду своих эксплуатационных качеств частотники все чаще применяются в различных технологических процессах. Каждый из них имеет свои особенности, которые зависят от их строения и принципа работы. Из достоинств этих устройств можно выделить:
- Невысокая стоимость. Относительно несложная конструкция делает их более доступными.
- КПД. Он является сравнительно высоким.
- Рекуперация. Частотный асинхронный преобразователь осуществляет как двигательную работу привода, и тормозную.
- Экономия. Например, частотный преобразователь для насоса может на 50% повысить экономичность его работы.
- Мощность. При добавлении преобразовательных комплектов, можно достичь любой мощности.
- Низкие частоты могут достигаться в широком диапазоне, при этом сохраняются стабильные двигательные вращения.
- Удобство. Конструкция в виде блоков и модулей делает возможным эксплуатацию устройства с небольшими затратами времени и труда.
Однако, есть и минусы:
- Выходной диапазон частот. ЧП работают только на понижение.
- Помехи. В напряжение, которое преобразуется появляются субгармоники, перекрывающие двигатель и создающие помехи.
- Структурная многоэлементность, по большей части результативна только для больших мощностей.
Область применения
Основные плюсы применения частотного преобразователя для электродвигателя — снижение влияния старта и торможения, возможность плавного регулирования скорости. Это дает возможность управлять работой двигателя без останова. Кроме этого, можно управлять группой двигателей, подключать движок на 220 В к сети 380 В и наоборот. Все это можно делать с асинхронными двигателями:
- Вентиляторы, швейные машины.
- Насосы, дымососы, компрессоры.
- Центрифуги.
- Крупная строительная техника (бетономешалки, манипуляторы и т.д.).
- Токарные или фрезерные станки.
Любой электрический двигатель при подключении через частотный преобразователь работает стабильно. Ведь большая часть устройств позволяет подобрать нужный режим питания для обеспечения нормальной работы.
Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Большая часть экономической эффективности заключается в возможности регулирования при помощи частотного преобразователя технологических характеристик процессов, температуры, давления, скорости движения, скорости подачи главного движения.
Данные параметры также регулируются широтно-импульсной модуляцией, а сама ширина импульсов модулируется по синусоидальному закону. Промежуточная цепь одного из трех типов: a преобразующая напряжение выпрямителя в постоянный ток. Примечание: для большинства приложений использование только пропорциональной и интегральной составляющей без использования дифференциальной составляющей даёт хорошие результаты.
Такой вид управления инвертором называется амплитудно-импульсной модуляцией АИМ. Преобразователь частоты – самое совершенное электронное устройство, через которое можно крутить асинхронный двигатель. Вот основные функции преобразователя частоты:
- Пуск/Стоп двигателя,
- Плавный разгон/замедление (торможение),
- Изменение рабочей скорости от 0 до 100% и выше номинала,
- Защита двигателя (их несколько – по току, температуре и др.),
- Реверс,
- Несколько вариантов управления (дискретное, аналоговое, по программе – от кнопок, реле, потенциометров, датчиков, контроллера, и т.д.).
Преобразователь частоты имеет несколько названий, которые используются на равных условиях:
- преобразователь частоты (ПЧ) – официальное название, его использует большинство производителей в своей документации,
- частотный преобразователь (ЧП),
- частотник – можно считать жаргоном, но в разговоре употребляется наиболее часто,
- инвертор,
- Inverter, Frequency Converter (FC), Variable Frequency Drive (VFD) – на английском.
Все эти названия могут использоваться в других сферах, поэтому иногда нужно уточнять. Что касается темы статьи, наша сфера – подключение преобразователя частоты для трехфазных асинхронных двигателей.
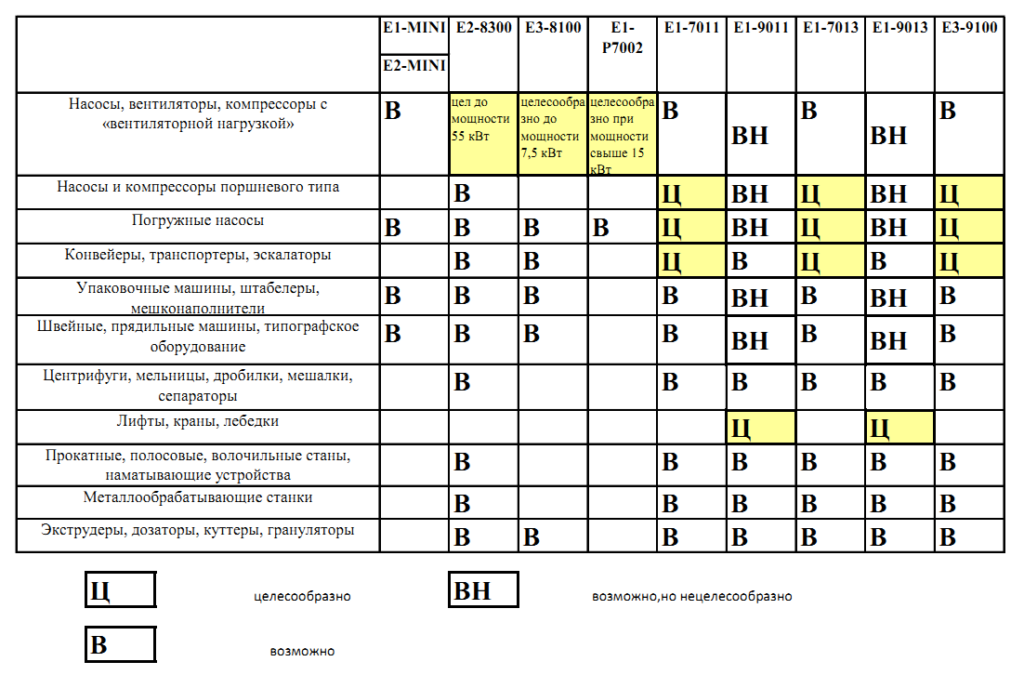
Таблица моделей преобразователей частоты.
Станки
Применение частотного преобразователя в станках обеспечивает:
- регулирование вращательной скорости;
- поддержание регламентного количества оборотов;
- упрощение кинематической схемы устройств;
- повышение удобства эксплуатации;
- обеспечение надежной работы станочной техники.
Преобразователи частоты для электродвигателей используются как для оснащения станков и станочных линий, так и в качестве привода прокатных станков.
Электротранспорт
Начинаются плюсы применения частотного преобразователя с цены, но ей не ограничиваются. Устройство обеспечивает:
- экономию потребляемой энергии;
- безопасность работы (функция электрического торможения);
- эффективность расхода энергии (функция рекуперации – возврата ресурса в сеть питания при активации системы торможения).
Насосное оборудование
Плюсы частотного регулирования работы электродвигателя насоса:
- плавная смена числа оборотов (позволила отказаться от массивной ненадежной запорной арматуры);
- снижение гидравлических потерь при закачке;
- экономия электроэнергии;
- увеличение производительности при максимальных нагрузках на станции.
Вентиляция
В вентиляционном оборудовании преобразователь частоты обеспечивает снижение расхода воздуха. Большинство вентиляторов оснащаются схемами, которые дают максимально возможный расход, но далеко не все вентиляционные системы могут работать при этом максимуме. Потому здесь так важна функция привода – частотника. Хотя у него есть альтернатива (дросселирование при постоянной скорости вращения вала).
Виды приборов
Из всех типов и классов инверторов, применяемых для электродвигателей асинхронного типа, наибольшее распространение получили устройства, действующие по принципу ШИМ (PWM) контроллера. Регулирование при этом может осуществляться одним из 2 методов.
- Скалярный способ – упрощенный режим.
- Векторный метод – полный вариант, который позволяет работать в любых алгоритмах.
Техническим стандартом, по которому можно классифицировать современные преобразователи частоты (иначе, частотники или ПЧ, как их сокращенно называют) является метод управления, применяемый в этих устройствах при регулировании скорости вращения двигателя.
Скалярный метод основан на поддержании постоянства отношения (U/f) в рабочих диапазонах скоростей, в процессе которого ведется контроль, как видно из формулы, только за величиной питающего напряжения и его частотой.
При векторном методе управления ведется контроль не только за величиной и частотой, но и за фазой питающего напряжения. Иначе говоря, контролируется угол и величина так называемого пространственного вектора, который вращается с частотой поля двигателя.
Скалярное управление наиболее применимо в электроприводах небольшой сложности в силу относительной простоты и минимального набора требуемых для работы функциональных параметров. Подходит для применений, где требуется поддерживать постоянство (с ограниченным диапазоном и точностью, по сравнению с векторным) определенной технологической величины, и где отсутствуют большие динамические нагрузки.
Векторный метод управления относительно скалярного имеет бóльшую производительность, диапазон и точность регулирования, в том числе на малых оборотах двигателя, чем перекрывает практически все недостатки скалярного принципа управления.
Тот или иной метод управления выбирается в зависимости от требований, которые заданы для технологического процесса – это глубина и точность регулирования, необходимость управления моментом на валу двигателя, состояние привода при переходных процессах – при пуске/стопе, ускорении, торможении.
Скалярный метод управления
Скалярный метод управления применяют для приводов малой и средней мощности с вентиляторной нагрузкой (т.е. для вентиляторов, насосов, компрессоров, дымососов с легким, либо нормальным режимом работы). Что особенно важно, при использовании скалярного метода имеется возможность управления многодвигательными приводами от одного преобразователя частоты.
Жесткость статических характеристик привода практически приближена к естественной характеристике. Диапазон скалярного принципа управления, при котором возможно регулирование оборотов двигателя, без потери момента сопротивления не превышает 1:10. Благодаря этому достигается постоянная перегрузочная способность двигателя, которая не зависит от частоты приложенного напряжения, но на низких частотах может произойти перегрев двигателя и снижение развиваемого им момента. Для того чтобы этого избежать, производят установку ограничения минимального значения выходной частоты.
При необходимости увеличения жёсткости характеристики и расширения границ регулирования применяют различные аналоговые или импульсные датчики скорости. Для этого в преобразователях частоты имеются дискретно-аналоговые управляющие входы.
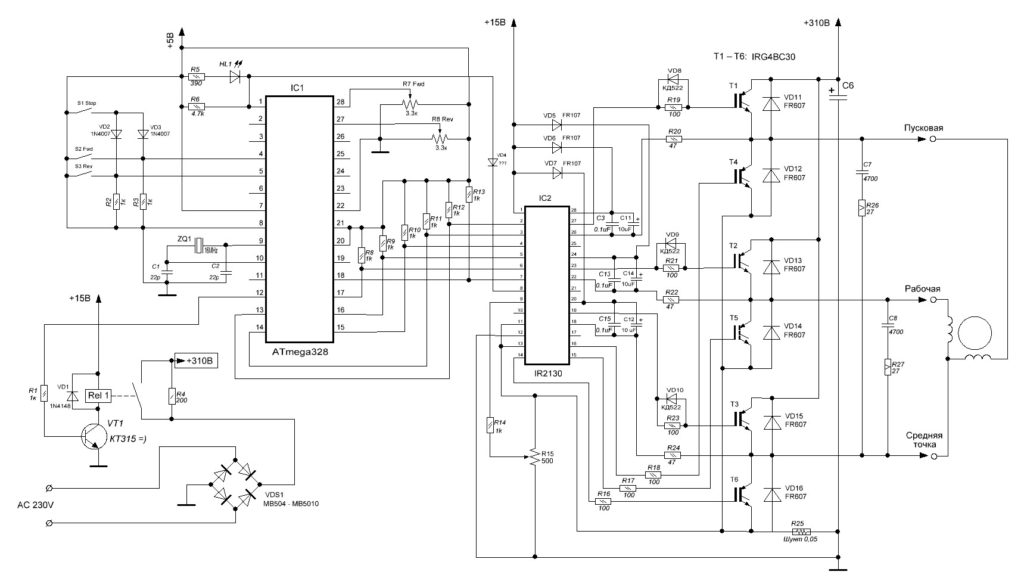
Схема скалярного управления преобразователя частоты.
Преобразователи частоты, управление в которых реализовано на методе скалярного управления, как правило, невысокой стоимости, более простые и широко применимы в электроприводе, где отсутствуют критичные требования к точности и диапазону регулирования. При вводе в работу подобных преобразователей достаточно учитывать лишь номинальные величины параметров электропривода, осуществить настройку стандартных опций защиты и управления.
Применение скалярного метода управления для выполнения плавного пуска, торможения и регулирования скорости вращения привода насосов снижает интенсивность гидравлических ударов, что позволяет сократить количество профилактических ремонтов оборудования и вероятность аварийных ситуаций, связанных с механическими нагрузками (преждевременный износ муфт, редукторов, подшипников двигателей).
При увеличении скорости напряжения питания статора пропорционально увеличивается. Скалярное управление способствует удержанию постоянства момента на валу в рабочем диапазоне частот (но на невысоких скоростях момент снижается, для этого в преобразователях частоты есть возможность задания момента для нижней границы скорости).
Плюсы и минусы скалярного метода:
- Возможность использования одного ПЧ для управления несколькими двигателями (групповое управление)
- Наиболее простая конструкция и легкая реализация метода управления + экономичность
- Универсальность (скалярного ПЧ достаточно для большинства промышленных двигателей и нагрузок)
- Постоянная перегрузочная способность
- Отсутствует возможность точного управления скоростью вращения вала. Однако, в отдельных преобразователях реализованы специализированные законы управления
- Не контролируется момент на валу. В редких случаях это может привести к возникновению недопустимо больших статорных токов
- Относительно низкий диапазон регулирования частоты вращения
- Относительно невысокое быстродействие
Решение проблемы: если требуется поддерживать постоянный момент на валу, то для этой задачи лучше подойдут векторные преобразователи частоты. Также возможна установка датчиков момента, но это сильно повышает общую стоимость + нельзя одновременно регулировать и момент, и скорость.
Векторный метод управления
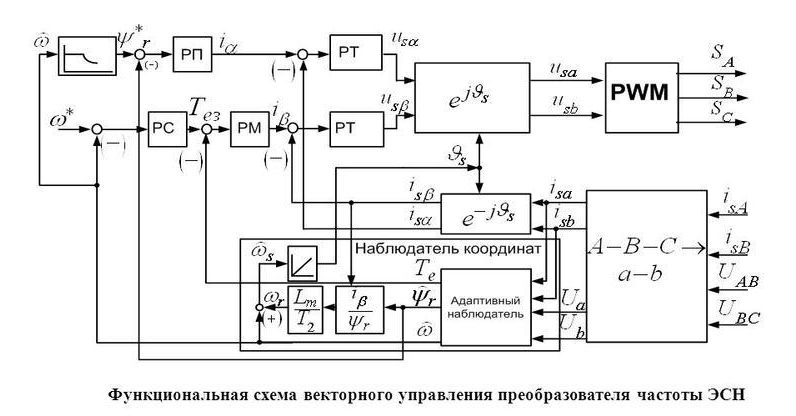
Преобразователи с частотно-векторным управлением в основном применяют для электроприводов с тяжелым режимом работы (вентиляторы высокой мощности, подъемное, буровое оборудование, системы позиционирования). Векторный метод управления не только формирует гармонические токи и напряжения фаз (как при скалярном методе), но и позволяет производить регулирование магнитного потока электродвигателя. Таким образом, производится управление магнитным полем статора и ротора, регулируется их взаимодействие между собой для оптимизации момента вращения на различных частотах. При этом, улучшается динамика электропривода за счет специального встроенного канала управления моментом нагрузки. Внутренняя обработка процессов регулирования в современных частотниках выполняется на базе мощного процессорного оборудования.
Векторной метод управления заключается в математическом представлении модели двигателя. Возможность такого решения основана на том, что проекция пространственного вектора тока статора на ось полюсов магнитного поля ротора (продольную ось) пропорциональна величине магнитного потока, а проекция на поперечную ось пропорциональна величине электромагнитного момента. Такой более прогрессивный метод позволяет независимо и почти безынерционно регулировать момент на валу и скорость вращения двигателя под нагрузкой.
Если требования к точности регулирования скорости допускают отклонение до 1,5%, а диапазон – менее 1:100, то может быть использована бездатчиковая система управления – управление по замкнутому кругу. При требовании точности регулировки скорости с отклонением менее 0,2% и диапазона 1:10000 применяется управление с датчиком скорости на валу. Такие системы называются системами управления двигателем с обратной связью по скорости и позволяют регулировать момент на малых частотах (до 1 Гц).
- повышенная точность и широкий диапазон регулирования скорости
- плавное регулирование скорости вращения двигателя во всем диапазоне частот
- возможность удержания постоянства скорости при изменении нагрузки электропривода
- уменьшение потерь при переходных процессах в приводе (в связи с этим увеличенный КПД двигателя)
- высокое значение крутящего момента двигателя на околонулевой скорости (при разгоне и торможении лифта);
- способность выдерживать большие перегрузки при работе привода;
- высокоточное регулирование скорости;
- специальные прикладные программы применения (уравновешивание нагрузки, быстрая остановка, компенсация момента инерции привода);
- дополнительные опции обеспечения безопасности в аварийных режимах управления (в том числе, функции аварийного завершения работы, функция перехода на резервный источник питания и т.д.);
- уменьшение механических нагрузок подъемной системы;
- снижение шума работы привода (благодаря высокой частоте коммутации ПЧ).
Несмотря на ряд весомых преимуществ стоит отметить, что вычислительная сложность при векторном методе управления высока, и при расчете оптимальных режимов работы привода необходимо учитывать большое количество параметров электропривода. Но там, где требуется обеспечивать широкий диапазон и точность регулирования, особенно, на низких частотах вращения, векторный преобразователь частоты будет незаменим.
Плюсы и минусы векторного метода:
- Наиболее полно учитываются динамические свойства АД, обеспечивается высокий КПД двигателя + контролируется момент на валу
- Высокая точность регулировки скорости
- Высокое быстродействие системы, реакция на изменение нагрузки
- Расширенный диапазон частотного регулирования при определенных моментах (номинальных) + плавный ход в области малых частот
- Невозможность группового управления. Для решения этой проблемы используйте скалярные преобразователи частоты
- Требуется максимально полная информация о параметрах двигателя + большая сложность вычислений
- Колебания скорости выше по сравнению со скалярным ПЧ (при постоянной нагрузке)
- Более высокая цена
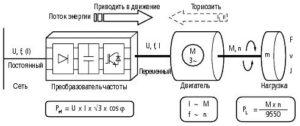
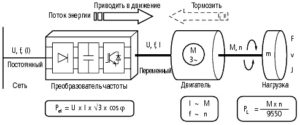
Принцип действия частотного преобразователя
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.
В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения. Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах. Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.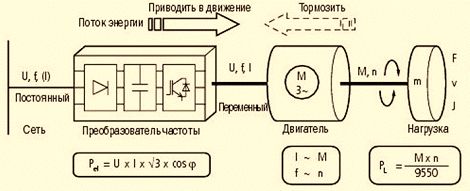
Управление асинхронными двигателями осуществляется двумя способами:
- Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
- Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
Возможности преобразователя частоты
Функциональные возможности современных частотников существенно расширены и позволяют автоматизировать работу электроприводов даже в самых сложных условиях.
Работа при нестабильном напряжении
Не все электрические сети могут обеспечить подключенное оборудование стабильным питанием. В идеале, современные преобразователи правильно выполняют свои функции в диапазоне напряжения питающей цепи 380-460 В, допустимое отклонение – 10%. Модели частотников, представленные на странице каталог позволяют сохранить работоспособность электродвигателя посредством автоматического перезапуска после кратковременного отключения (просадки) питания с плавным изменением скорости и момента мотора.
Работа на резонансных частотах
Собственная резонансная частота некоторых механизмов может вызывать недопустимые вибрации, часто являющиеся причиной выхода системы управления из строя. Благодаря функции исключения недопустимых частот работа частотника становится безопасной, а сам механизм защищен от возможной поломки.
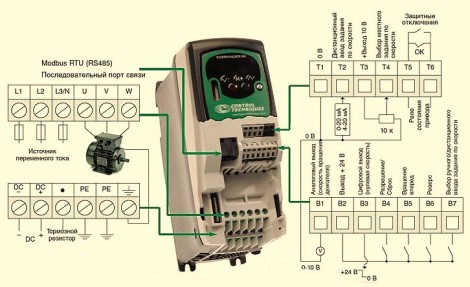
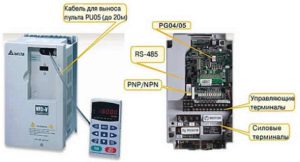
Сетевой обмен
Для совместной работы электродвигателя и системы автоматического управления используются различные протоколы передачи данных. Наибольшее распространение получил протокол связи Modbus с интерфейсом RS-485, однако в зависимости от используемого оборудования вопрос об использовании того или иного протокола уточняется для каждого конкретного случая.
Оптимальный выбор преобразователя частоты сводится к соответствию его функциональности техническим характеристикам электродвигателя. На сайте компании «ЭНЕРГОПУСК» приведен огромный ассортимент электронных регулирующих устройств, где можно остановится на оптимальном выборе электротехнического прибора исходя из экономической целесообразности покупки и эксплуатации.
Настройка частотного преобразователя для электродвигателя
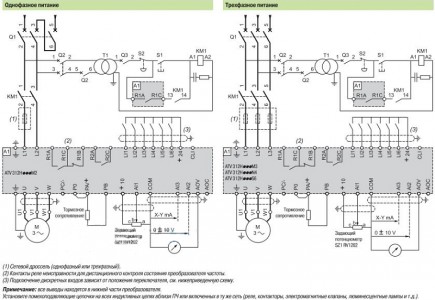
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель. Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом. В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.
 Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя. Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».
 Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
После незначительного поворота рукоятки, двигатель начинает постепенно вращаться. Для переключения вращения в обратную сторону, существует специальная кнопка реверса. Затем с помощью рукоятки настраивается нужная частота вращения. На некоторых пультах вместо частоты вращения электродвигателя, отображаются данные о частоте напряжения. Поэтому рекомендуется заранее внимательно изучить интерфейс установленной аппаратуры.
Частотные преобразователи для асинхронных двигателей
Благодаря частотным преобразователям, работа современных асинхронных двигателей отличается высокой эффективностью, устойчивостью и безопасностью. Это особенно важно, поскольку каждый электродвигатель отличается индивидуальными особенностями режима работы. Поэтому оптимизации параметров питания агрегатов с использованием преобразователей частоты придается большое значение. Когда частотный преобразователь выбирается для каких-либо конкретных целей, в этом случае должны обязательно учитываться его рабочие параметры.
Нормальная работа устройства будет зависеть от типа электродвигателя, его мощности, диапазона, скорости и точности регулировок, а также от поддержания стабильного момента вращения вала. Эти показатели имеют первостепенное значение и должны органично сочетаться с габаритами и формой аппарата. Следует обратить особое внимание на то, как расположены элементы управления и будет ли удобно им пользоваться.
Выбирая устройство, необходимо заранее знать, в каких условиях оно будет эксплуатироваться. Если сеть однофазная, то и преобразователь должен быть таким же. То же самое касается и трехфазных аппаратов. Многое зависит от мощности асинхронных двигателей. Если при запуске на валу необходим высокий пусковой момент, то и частотный преобразователь должен быть рассчитан на большее значение тока.
Схема частотного преобразователя асинхронного двигателя
Принцип работы частотного преобразователя
Частотные преобразователи: принцип работы
Асинхронный двигатель

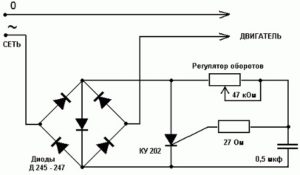
Схема частотного преобразователя

Регулировка оборотов асинхронного двигателя
Классификация преобразователей частоты
По типу питающего напряжения преобразователи частоты делятся на разновидности:
- однофазные;
- трехфазные;
- высоковольтные аппараты.
Основную задачу преобразователя частоты можно сформулировать следующим образом: перевод рабочего процесса на экономичный режим с помощью управления скоростью и моментом двигателя, согласно заданным техническим параметрам и характеру нагрузки.
При этом цифровой дисплей прибора показывает такие параметры работы системы, как:
- величина I и U двигателя;
- выходные значения частоты, скорости, мощности и момента (f, v, Р и М);
- отображение состояния дискретных входов для регулирования скорости вращения вала АД и дистанционного управления системой;
- продолжительность работы самого частотного преобразователя.
По сфере использования типы инверторы бывают:
- промышленного назначения мощностью до 315 кВт;
- ПЧ с векторным управлением мощностью до 500 кВт;
- для управления механизмами с насосно-вентиляторным типом нагрузки (Р 15 — 315 кВт);
- частотники для кранов и других подъемных конструкций;
- для применения в условиях взрывоопасности;
- устанавливаемые ЧРП прямо на электродвигатель.
Структура частотного преобразователя
Структура современного ПЧ выстраивается по принципу преобразования энергии и включает в себя силовую и управляющую составляющую. Первая, как правило, исполняется на тиристорах или транзисторах, коим отводится роль электроключей. Управляющий блок реализуется на микропроцессорах. С помощью ключей размыкающий и замыкающий цепи он позволяет молниеносно решать множество заданий по диагностике, защите, контролю.
По принципу работы частотные преобразователи бывают двух типов:
- с наличием промежуточного звена постоянного тока;
- с непосредственной связью.
Всем им присуще ряд достоинств и недостатков, обуславливающих сферу эффективного использования каждого из них.
Непосредственные частотные преобразователи
Они принадлежат к наиболее ранним аппаратам с упрощенной силовой частью, представляющей собой выпрямитель на тиристорах.
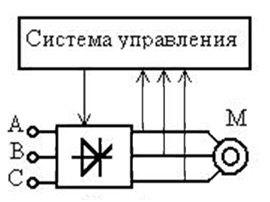
Система управления по очереди отмыкает групповые тиристоры и подключает обмотки электродвигателя к сети питания. Непосредственные – это реверсивный тиристорный частотник. Основное его преимущество заключается в том, что он подключается напрямую в сеть без добавочных устройств.
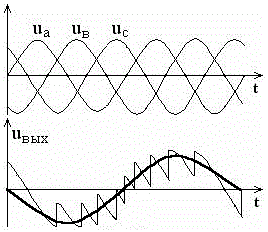
Таким манером получается, что U вых частотника образуется из усеченных отрезков синусоид U вых. На рисунке приведён пример сформировавшегося U вых для одной из фаз нагрузки. На вход тиристоров подаётся 3-х фазное синусоидальные составляющие Uа, Uв, Uс. Напряжение U вых представляется несинусоидальной «пилообразной» формой, которая в аппроксимированном виде выглядит как синусоида (жирная кривая). На чертеже показано, что частота U вых не может быть равной либо превышать частоту сети питания. Поэтому и невелик диапазон управления частоты вращения электродвигателя (менее 1: 10). Ограничивающие пределы не дают возможность использовать подобные частотные преобразователи в навороченных ЧРП. Последние рассчитаны на широкий диапазон регулировки показателей.
Применение тиристоров в большей степени усложняет систему управления, и поэтому этого стоимость преобразователя частоты увеличивается.
Выходная «усеченная» синусоида частотника – это источник высокочастотных гармоник, вызывающих добавочные потери в электродвигателе, перегревание электромашины, уменьшение момента, мешающие работе шумы в сети питания. Использование компенсирующих приспособлений повышает цену, массу, размеры, понижает КПД всей системы.
Тем не менее, непосредственные частотные преобразователи радуют пользователей своими определёнными достоинствами. К ним относятся:
- достаточно большой КПД, достигаемый одним преобразованием электроэнергии;
- работа в различных режимах, включая с рекуперацией энергии в сеть;
- надежность, относительная дешевизна, полная управляемость и удобство;
- наличие возможности неограниченного наращивания мощности системы;
Такие схемы применяются в электроприводах выпуска прошлых лет. В новых конструкциях они на практике не разрабатываются.
Устройство частотных преобразователей
Современный частотный инвертер состоит из двух принципиальных блоков. Первый блок полностью сглаживает напряжение и на выходе выдаёт постоянное. Постоянное напряжение подаётся на силовой блок генерации частоты. После преобразования, на выходе из второго блока частота напряжения уже будет такая, какая задана настройкой.
За возможность изменять частоту напряжения отвечает микропроцессор, который встроен в частотник. Используя заданную программу, процессор следит за выходной частотой напряжения, а также за параметрами работы электрического двигателя.

По сути, частотные преобразователи для асинхронных двигателей принцип работы которых заключён в простом вырабатывании нужной частоты переменного тока, это модуляторы нужной природы напряжения, которая необходима для того или иного оборудования. Именно это и снизило негативное влияние на работу электрического двигателя, которое имело место быть при использовании конденсатов.
Электрический двигатель получает именно такое напряжение, которое положено ему для нормальной и полноценной работы.
Считаем нужным отметить, что и при наличии линии трёхфазного напряжения, не всегда рационально подключать электрический двигатель к сети просто через выключатель. В таком случае, двигатель будет работать, но регулировать его работу не получится. Не получится и следить за состоянием обмоток.
В промышленном исполнении можно встретить два основных типа частотных преобразователей:
- Специальные.
- Универсальные.

Специальный частотный преобразователь для асинхронного двигателя, схема которого несколько отличается от универсального, изготавливается под конкретное оборудование по конкретным потребностям. Как правило, это очень урезанные версии, не способные на работу с любым оборудованием.
Универсальные частотные инвертера могут работать, как и в специальном оборудовании, так и во всех остальных вариантах применения. На то они и универсальные, что их можно настраивать и программировать под любые нужды.
Поэтому, выбор частотного преобразователя для асинхронного двигателя должен быть не столько продиктован конкретными необходимостями производства, но и возможностью модернизации оборудования.

Практически во всех частотниках сегодня реализована возможность установки и контроля режима работы электрического двигателя с пульта управления. Первый интерфейс управления встроен в сам корпус частотника. Там же есть и ручка регулирования скорости вращения двигателя.
Но можно и применять выносные пульты управления. Которые можно располагать как в диспетчерской, так и непосредственно на станке, который приводится в движение электрическим двигателем.
Такое чаще встречается в ситуациях, когда станок с двигателем находится в помещении, где не рекомендуется установка частотного инвертора. И его устанавливают вдали от оборудования.
Большая часть инвертеров частоты позволяют программировать работу оборудования. Но, задать программу просто с пульта управления не получится. Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы.
Разница типов сигналов управления
При проектировании цеха очень важно учитывать, что общение частотных преобразователей с диспетчерским пультом будет происходить при помощи электрических импульсов по проводам связи. Пи этом, не стоит забывать, что разные стандарты связи по-разному влияют друг на друга. Посему, переда данных одним способом, может существенно снижать качество передачи данных другим способом.
Поэтому, расчет частотного преобразователя для асинхронного двигателя должен производиться не только по его электротехническим показателям, но и по показателям совместимости с сетью.
Выбор мощности частотного преобразователя
Вопрос мощности частотника, скорее всего, стоит на первом плане, при расчете привода для любого станка или агрегата. Дело в том, что большинство частотных инвертеров способны выдерживать большие перегрузки до 200 – 300 %. Но, это совсем не означает, что для питания электрического двигателя можно смело покупать частотник сегментом ниже, чем требуется по планированию.
Выбор мощности частотного преобразователя осуществляется с обязательным запасом в 20 – 30%. Игнорирование этого правила может повлечь за собой выход из строя частотного преобразователя и простой оборудования.

Также важно учитывать пиковые нагрузки, которые может выдерживать частотник. Дело в том, что при старте электрического двигателя его пусковые токи могут сильно превышать номинальные. В некоторых случаях, пусковой ток превышает номинальный в шесть раз! Частотик должен быть рассчитан на такие изменения.
Каждый электрический двигатель оборудован вентилятором охлаждения. Это лопасти, которые установлены в задней части двигателя и по мере вращения вала прогоняют через корпус мотора воздух.
Если электрический двигатель работает на пониженных оборотах, то мощности потока воздуха может не хватить для охлаждения.
В этом случае, нужно выбирать частотник с датчиками температуры двигателя. Или организовать дополнительное охлаждение.

Электромагнитная совместимость преобразователей частоты
При расчёте и подключении частотника к сети и электрическому двигателю, следует помнить, что он очень подвержен помехам. Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга.

По своей сути, применение частного преобразователя для питания асинхронного электрического двигателя позволило существенно продлить жизнь электрического двигателя, дало возможность регулировать работу двигателя и хорошо экономить на расходе электрической энергии.

Конструкция частотного преобразователя
Основными элементами частотного преобразователя являются силовая часть (преобразователь электрической энергии) и управляющее устройство (контроллер). Современные частотные преобразователи обычно имеют модульную архитектуру, что позволяет расширять возможности устройства. Также зачастую имеется возможность установки дополнительных интерфейсных модулей и модулей расширения каналов ввода/вывода.
Функциональная схема частотного преобразователя

Методы управления
На микроконтроллере частотного преобразователя выполняется программное обеспечение, которое управляет основными параметрами электродвигателя (скоростью и моментом). Основные методы управления бесщеточными двигателями, используемые в частотных преобразователях представлены в таблице ниже.
Метод управления электродвигателе Диапазон регулирования скорост Погрешность скорости3, %Время нарастания момента, мс Пусковой момент Цена Стандартные применения Скалярный
Векторный Линейный Полеориентированное управление
Прямое управление моментом с ПВМ
Нелинейный Прямое управление моментом с таблицей включения
Прямое самоуправление
| 1:101 | 5-10 | Не доступно | Низкий | Очень низкая | Низкопроизводительные: насосы, вентиляторы, компрессоры, ОВК (отопление, вентиляция и кондиционирование) |
| >1:2002 | 0 | <1-2 | Высокий | Высокая | Высокопроизводительные: краны, лифты, транспорт и т.д. |
| >1:2002 | 0 | <1-2 | Высокий | Высокая | |
| >1:2002 | 0 | <1 | Высокий | Высокая | |
| >1:2002 | 0 | <1-2 | Высокий | Высокая | Высокопроизводительные: электрическая тяга, быстрое ослабление поля |
Характеристики основных способов управления электродвигателями используемых в частотных преобразователях Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Методы модуляции
Широкое развитие силовых электрических преобразователей в последние десятилетия привело к увеличению количества исследований в области модуляции. Метод модуляции непосредственно влияет на эффективность всей энергосистемы (силовой части, системы управления), определяя экономическую выгоду и производительность конечного продукта.
Главная цель методов модуляции – добиться лучшей формы сигналов (напряжений и токов) с минимальными потерями. Другие второстепенные задачи управления могут быть решены посредством использования правильного способа модуляции, такие как уменьшение синфазной помехи, выравнивание постоянного напряжения, уменьшение пульсаций входного тока, снижение скорости нарастания напряжения. Одновременное достижение всех целей управления невозможно, необходим компромисс. Каждая схема силового преобразователя и каждое приложение должны быть глубоко изучены для определения наиболее подходящего метода модуляции.
Как параметрировать (программировать) частотный преобразователь
В настоящий момент все частотные преобразователи программируемые (параметрируемые), или управляются с помощью внешних процессоров (Программируемых логический контроллер — PLC).
Если частотный преобразователь работает без использования ПЛК, все параметрирование (программирование) в ваших руках!
Самое простое, задать пусковой режим и режим на остановку. Однако есть еще несколько режимов, как пример режим когда вышеупомянутый лифт будет спускается вниз. В этом случае преобразователь частоты будет сдерживать обороты двигателя и принимать на себя электрическую мощность создаваемые двигателем. Именно для этого в некоторые инверторы встроены или подключаются нагрузочные сопротивления, на них то и отдаёт частотный преобразователь лишний ток.
Так как в частотном преобразователе нет механических элементов, все преобразования частоты основанно на работе IGBT-транзисторов. Именно они при работе больше всего подвержены нагрузке. Задача параметрирования или программирования удержать параметры тока проходящие через транзисторы в тех параметрах, которые заложил производитель!
По этому важно подбирать преобразователь частоты с превышением номинальной мощности двигателя. Если пуски и остановы редки, и большая часть работы проходит в номинальном режиме, то инвертор будет успевать остывать. Если же максимальные токи или пики будут следовать один за другим, транзисторы будут перегреваться.
Не стоит забывать, что в моменты разгона двигателя (частотой) выше номинала, его потребляемая мощность увеличивается не линейно.
Нужно серьезно отнестись и описать работу частотного преобразователя по внештатным ситуациям. Это необходимо для сохранения самого инвертора и процессов которые он выполняет. Это касается и временного перегруза выше номинала, перекоса фаз
Режимы работы двигателя (диаграммы нагрузок)
Иными словами, рассматривать частотный преобразователь независимо от двигателя не имеет смысла! В свою очередь двигатель выполняет свою роль в технологическом процессе и работает в неком режиме.
Есть пять основных режима работы двигателя: грузоподьемная, транспортная, сухого трения, вязкой среды и вентиляторная. Каждая из характеристик обуславливает свою специфику программирования работы. Как пример «вентиляторная» (или насосная) самая простая т.к. при программировании нужно учитывать зависимость сопротивления от оборотов. Величина предсказуемая, но не линейная. Тогда как «грузоподьемная» равномерна по скорости, но изменяется по нагрузке. Не говоря о «транспортной», хотя как правило тут чаще используются двигатели постоянного тока.
Как пример, если брать производство пива, то основные приводы (частотные преобразователи) будут в приводах лент конвейера и насосах, вентиляторах. Иными словами «грузоподьемная» и «вентиляторные» характеристики. Причем диапазон используемых мощностей от 5 до 15кВт, если конечно мы не берем солодовни и инженерные системы как то очистные сооружения. Тормозные резисторы или не требуются или используются внешние.
Как выбирать
Для производителей преобразователей частоты и другого электронного оборудования основным инструментом завоевания рынка является цена. С целью её уменьшения они создают приборы с минимальным набором функций. Соответственно, чем универсальнее конкретная модель, тем выше её цена. Для нас это имеет большое значение по той причине, что для эффективной и долгой работы двигателя может потребоваться ПЧ с определенными функциями. Давайте рассмотрим основные критерии, на которые следует обращать внимание.
Управление
По способу управления частотные преобразователи делят на векторные и скалярные. Первые на сегодня встречаются гораздо чаще, однако имеют более высокую цену по сравнению со вторыми. Преимущество векторного управления заключается в высокой точности регулировки. Скалярное управление очень просто, оно может лишь удерживать соотношение выходного напряжения и частоты на заданной величине. Такой преобразователь целесообразно ставить на небольшой прибор без высокой нагрузки на двигатель, например, вентилятор.
Мощность
Безусловно, чем это значение выше, тем лучше. К слову, в данном вопросе цифры не столь важны. Обратите большее внимание на фирму-производителя – чем «родственнее» ваше оборудование друг к другу, тем более эффективно оно будет работать. Кроме того, использование нескольких преобразователей от одного бренда поддерживает принцип взаимозаменяемости и простоты обслуживания. Подумайте и наличии в вашем городе соответствующего сервисного центра.
Сетевое напряжение
В данном случае действует тот же принцип, что и в предыдущем разделе – чем шире рабочий диапазон напряжения, тем лучше для нас. Отечественные электросети, к сожалению, слабо знакомы с понятием «стандарт», поэтому лучше максимально обезопасить аппаратуру от вероятных перепадов. Падение напряжения едва ли приведет к серьезным последствиям (преобразователь, скорее всего, просто отключится), а вот большое повышение опасно – оно может привести поломке устройства в результате взрыва электролитических сетевых конденсаторов.
Диапазон частотной регулировки
В данном случае следует опираться исключительно на требования производства и конкретных устройств. Так, например, для такого оборудования, как шлифовальные машины важно значение максимальной частоты (от 1000 Гц). Стандартом нижнего предела считается соотношение 1 к 10 по отношению к верхнему. На практике чаще всего используются преобразователи с диапазоном от 10 до 100 Гц. Заметьте, что широким диапазоном регулировки обладают только модели преобразователей с векторным управлением.
Входы управления
Для передачи команд управления в преобразователях предназначены дискретные входы. С помощью них осуществляется запуск двигателя, остановка, торможение, обратное вращение и т.д. Для сигналов обратной связи, осуществляющих текущий контроль и настройку привода непосредственно во время работы, используются аналоговые входы. А цифровые используются для передачи сигналов с высокой частотой, генерируемых энкодерами (датчиками угла поворота).
Фактически, чем больше вводов, тем лучше, однако большое их количество не только делает сложной настройку прибора, но и повышает его стоимость.
Количество выходных сигналов
Дискретные выходы преобразователя необходимы для вывода сигналов, сообщающих о возникновении проблем, таких как, перегрев устройства, отклонение величины входного напряжения от нормы, авария, ошибка и т.п. Аналоговые выходы необходимы для передачи обратных связей в сложных системах. Принцип выбора тот же: ищите баланс между количеством сигналов и стоимость прибора.
Шина управления
В поиске подходящей шины управления поможет схема подключения преобразователя частоты – количество выходов и входов должно быть, как минимум, равным, но лучше купите шину с небольшим запасом – значительно облегчите себе дальнейшее усовершенствование устройства.
Перегрузочные способности
Нормой считается, если мощность частотного преобразователя выше мощности двигателя на 10-15%. Ток тоже должен быть немного выше номинала двигателя. Однако такой подбор «на глаз» рекомендуется только в случае, когда нет необходимой технической документации на двигатель. При ее наличии – тщательно ознакомьтесь с требованиями и подберите соответствующий преобразователь. Если важны ударные нагрузки, пиковый ток преобразователя должен быть больше указанного значения на 10%.
Самостоятельная сборка
Несмотря на то, что покупка надежного и долговечного частотного преобразователя является приоритетным вариантом, такой прибор можно собрать своими руками. Во всемирной сети выложена не одна схема и инструкция, как это сделать. В действительности, сборка своими руками может стать отличной альтернативой в ситуации, когда преобразователь нужен для небольшого бытового устройства. Самодельное устройство справится со своими задачами не хуже покупного, а будет стоить значительно дешевле. Но попытки создания подходящего преобразователя для работы мощных асинхронных двигателей лучше оставить – здесь, как ни старайся, превзойти профессиональные приборы по эффективности и качеству не получится.
Итак, давайте подробно рассмотрим, как собрать частотный преобразователь для асинхронного двигателя своими руками. Обратите внимание, что параметры домашней однофазной электросети позволяют использовать в данном случае двигатель с мощностью не больше 1 кВт.
-
- Для работы двигателя нам необходима схема подключения обмоток «треугольник». Для этого нужно выводы обмоток соединить между собой последовательно, соблюдая принцип «вывод одной обмотки к вводу другой».




- Для того чтобы сконструировать преобразователь своими руками нам необходимы следующие компоненты:
- любой микроконтроллер аналогичный AT90PWM3B;
- драйвер трехфазного моста (аналог IR2135);
- 6 транзисторов IRG4BC30W;
- 6 кнопок;
- индикатор.
- В конструкцию создаваемого нами прибора входят две платы, на одной из которых располагаются драйвер, блок питания, входные клеммы и транзисторы, а на второй – индикатор и микроконтроллер. Для соединения плат между собой воспользуемся гибким шлейфом.
- Для сборки частотного преобразователя необходимо использовать импульсный блок питания. Можно воспользоваться готовым устройством, или собрать его самостоятельно (не будем описывать данный процесс – это тема для отдельной статьи).
- Для контроля за работой двигателя необходимо подвести внешний управляющий ток, однако мы можем воспользоваться микросхемой IL300 с линейной развязкой.
Изображение - Транзисторы и диодный мост устанавливаются на общем радиаторе.
- Для дублирования управляющих кнопок используются оптроны ОС2-4.
- Установка трансформатора на однофазный преобразователь частот для двигателя небольшой мощности не является обязательным шагом. Можно обойтись токовым шунтом с сечением проводов 0,5 мм, и к нему подключить усилитель DA-1 (кстати, он же будет служить для измерения напряжения).
- В нашем случае мы собираем своими руками преобразователь для асинхронного двигателя мощность в 400 Вт, поэтому не станем устанавливать термодатчик – схема и без него достаточно сложна.
- По окончанию сборки необходимо изолировать кнопки с помощью пластмассовых толкателей. Управление кнопками осуществляется с помощью опторазвязки.
Обратите внимание, что при использовании длинных проводов, на них необходимо надеть помехоподавляющие кольца.

Он позволяет регулировать вращение двигателя в диапазоне частоты 1:40.
Защита и безопасность
Преобразователь частоты — умное устройство. После настройки в работу включаются все защитные функции, которые в случае аварии сберегут и сам частотник, и двигатель, и механизм.
Например, при заклинивании: преобразователь вычислит, что ток двигателя намного выше номинального, который мы установили в параметре F1-03 ранее, выдаст ошибку «Перегрузка двигателя» и отключится. Двигатель не перегреется и не сгорит, а механика останется целой.
А если возникла угроза здоровью оператора или поломки оборудования — спасет аварийная кнопка «грибок». При её нажатии преобразователь в мгновение остановит станок и отключит питание. Никто не пострадает!
Вместо заключения
Настройка частотного преобразователя — процесс увлекательный. Порой преобразователь берёт на себя не только управление двигателем, но и целой системой и может заменить даже простой контроллер. К частотнику можно подключать датчики, лампы индикации, реле и даже контакторы. Применение преобразователю можно найти везде: от насосов и конвейеров до сложных станков, подъёмников и лифтов. Главное внимательно изучать документацию и делать всё по порядку, тогда всё обязательно получится.
- https://electric-220.ru/news/princip_raboty_chastotnogo_preobrazovatelja_dlja_asinkhronnogo_dvigatelja/2017-03-30-1215
- https://ElectroInfo.net/invertory/zachem-nuzhen-preobrazovatel-chastoty.html
- https://epusk.ru/articles/chastotnye-preobrazovateli/chastotnyy-preobrazovatel-chto-eto/
- http://chistotnik.ru/dlya-chego-nuzhen-chastotnyj-preobrazovatel.html
- http://chistotnik.ru/chastotnye-preobrazovateli-dlya-asinhronnyh-dvigatelej.html
- https://engineering-solutions.ru/motorcontrol/vfd/
- https://zen.yandex.ru/media/id/5b9b97507e60b200aa1ac378/chto-takoe-chastotnyi-preobrazovatel-i-zachem-on-nujen-5b9b9da4f7df7900accd5e25
- http://TokIdet.ru/elektrooborudovanie/elektrodvigateli/princip-raboty-chastotnogo-preobrazovatelya.html
- https://shop.idelectro.ru/blog/sovety/kak-zapustit-i-nastroit-chastotnyy-preobrazovatel-instruktsiya-dlya-chaynikov/